Contact

Prof. Dr.-Ing.
Tamara Bechtold
Tel. +49 4421 985-2564
Jade University of Applied Sciences
Friedrich-Paffrath-Straße 101
26389 Wilhelmshaven
Germany
ADOPT - Adaptive Optics for THz
Electromagnetic beam steering, especially in the THz range, is attracting more and more attention with respect to communication (6G) or sensing and imaging. While various transmit- or reflectarrays have recently been developed for these purposes, their efficiency is still limited compared to simple metal reflectors. Combined beam steering and focusing requires a multi-actuator system that allows a rotational as well as a linear shift of mirrors with large working ranges. Multistable cooperative actuator systems fulfill these requirements. A prominent example is the main mirror of the James Webb space telescope that makes use of hexagonal mirror elements in combination with actuators for the individual alignment of each mirror. Within this project, we therefore address the combination of cooperative multistable linear and rotational actuators for Adaptive Optics for THz - ADOPT. ADOPT builds upon our research from our former project Kick and Catch where we elaborated a bi-stable out-of-plane movement of a freely movable mass and quasi-continuous tilt angles of spheres. Now, we will take the next steps: We will integrate both mechanisms from Kick and Catch in one device with a larger number of stable positions. The single integrated elements will be arranged in an array to prove the final overall function, i.e., an adaptive THz mirror. Each mirror element consists of a piston, which can reach multiple vertical resting positions by an impulse-like acceleration from its initial position and a subsequent catch in the desired levitation position. On top of the setup, a sphere cap with an attached hexagonal mirror plate can be rotated by many small subsequent impulses. Seven of these elements will then be arranged to form a module, which will lay the foundations for larger systems with more modules. This allows synchronous redirecting as well as refocusing by adjusting the curvature. Due to the large wavelength of THz radiation, there are only few requirements for imaging, while a large field of view and relative deflection of the single mirrors are important. The system provides a cooperation of a piezoelectric kick and magnetic catch within a linear system and an all-electrostatic tilt system. The set-up will be strongly miniaturized, it comprises micro actuators, multistability, internal sensing and control. Four research groups will join forces to tackle the challenges of the new cooperative actuation concepts of ADOPT. Two of the four partners, Ulrike Wallrabe and Martin Hoffmann, have a long-term focus on microactuators. Tamara Bechtold is an expert in modeling and system-level simulation of multiphysical systems. Finally, Christoph Ament provides the expertise in control theory with a focus on nanopositioning.
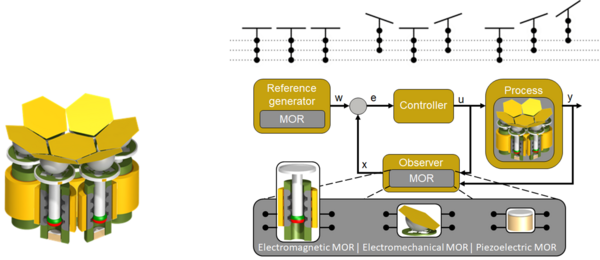
The Research Group for Modeling and Simulation of Mechatronic Systems (MSMS) under the guidance of Prof. Bechtold contributes its expertise in computer simulation and model order reduction. The computer simulations predict microactuator's complicated behavior and thus save development costs, since fewer expensive prototypes are required.
University of Freiburg
Department of Microsystems Engineering
Prof. Ulrike Wallrabe
Georges-Köhler-Allee 102
79110 Freiburg
Ruhr University Bochum
Chair for Microsystems Technology
Prof. Martin Hoffmann
Universitätsstraße 150
44801 Bochum
University of Augsburg
Chair for Control Theory
Prof. Christoph Ament
Eichleitner Straße 30
86159 Augsburg
