Cooperative Pilotage für Schiffe und Leitsysteme (greenCoPilot)
| Projektleiter | |
| Mitarbeiter | Moritz Oberjatzas, Dipl.Wi.-Math. Dipl.Ing. Jan-Hendrik Wesuls, WiMi |
| Projektvolumen | 457.420 |
| Fördermittelgeber |
|
| Projektlaufzeit | 01/02/2019 – 31/01/2022 |
| Kooperationspartner |
|
| Assoziierte Partner |
|
Schiffsunglücke in küstennahen Gewässern und Revieren beherbergen immer großes Schadenspotential für Umwelt und Menschen. Bessere Kommunikation und Automation tragen dazu bei, synchronisierte Lagebilder des Verkehrs an Bord der beteiligten Schiffe und in den Revierzentralen zu erzeugen. Daher ist es naheliegend, über autorisierte Modifikationen den Verkehrsablauf zentralisiert zu steuern. Es soll ein System zur Wegplanung von Schiffen aufgebaut werden, mit dem basierend auf erweiterte Routen-Parametersätze für die Schiffe, realisierbare Wege an Bord für eine Pier-zu-Pier-Navigation geplant werden können. Durch Schaffung eines Standard-Datensatzes für Manövrierkennwerte der Schiffe sollen diese Planungen auch bordextern mit nautischer Kompetenz verändert werden können.
Im Projekt greenCoPilot wird dazu ein Prototyp auf einer mobilen Brücke entwickelt, mit dem das Verfahren parallel an Bord und auch in der Revierzentrale unter nautischer Expertise erprobt werden kann. Der Kerngedanke des Vorhabens greenCoPilot besteht in der Beibehaltung der Verantwortung für nautisches Personal durch Verteilung von Manövrierkenndaten an die Leitstellen.
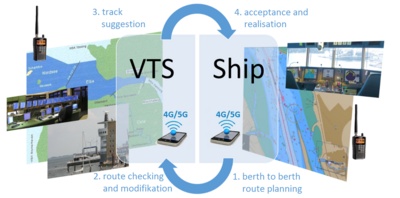
So kann das zu entwickelnde System im regulären Bordbetrieb eingesetzt werden. Die Revierzentralen erhalten per Funk/WiFi Kenntnis vom Fahrweg des Schiffes. Im Versuchsaufbau wird es möglich, dass der diensthabende Nautiker der Revierzentrale mit Kenntnis der Manövrierdaten Routen-Modifikationen vornimmt, diese zurück an das Schiff als Vorschlag sendet. Nun können auf der Brücke Lotse oder Kapitän entscheiden, ob sie die Änderungen akzeptieren oder nicht. Die geänderte Wegplanung kann dann direkt auf den Autopiloten geschaltet werden. Entsprechend wird das Lagebild wieder synchronisiert